前言
首先,必须要认识到,把矩阵乘法优化到极致这件事情是一个非常非常难的事情,很多做芯片的搞体系结构的人都盯着这个方向。因此,作为一个初学者,我比如要想清楚自己到底为什么要做这个项目。我给自己定的小目标是以下三个:
- 通过矩阵乘法的优化,大概了解GPU的基本架构,并能大概估计硬件层面的架构对于软件的性能到底会产生的影响。
- 实现一个足够具有扩展性的实验架构,如果以后对于其他kernel的优化感兴趣,也能快速实验,对比不同实现的优劣。(提前给自己挖个坑,之后要去做Attention层的优化)
- 学习 Nsight Compute 的使用,能够从 Profiling 工具中看出当前 kernel 的优化空间在哪里。
站在这个目的之上,我并不需要从头自己去实现,甚至我必须要多去抄一抄别人的实现, 然后思考他们为什么要这么实现。本文主要是翻译自 siboehm的博客, 他的图画的实在是太棒了, 非常的形象。我做了一些自己的补充,希望不是画蛇添足吧。
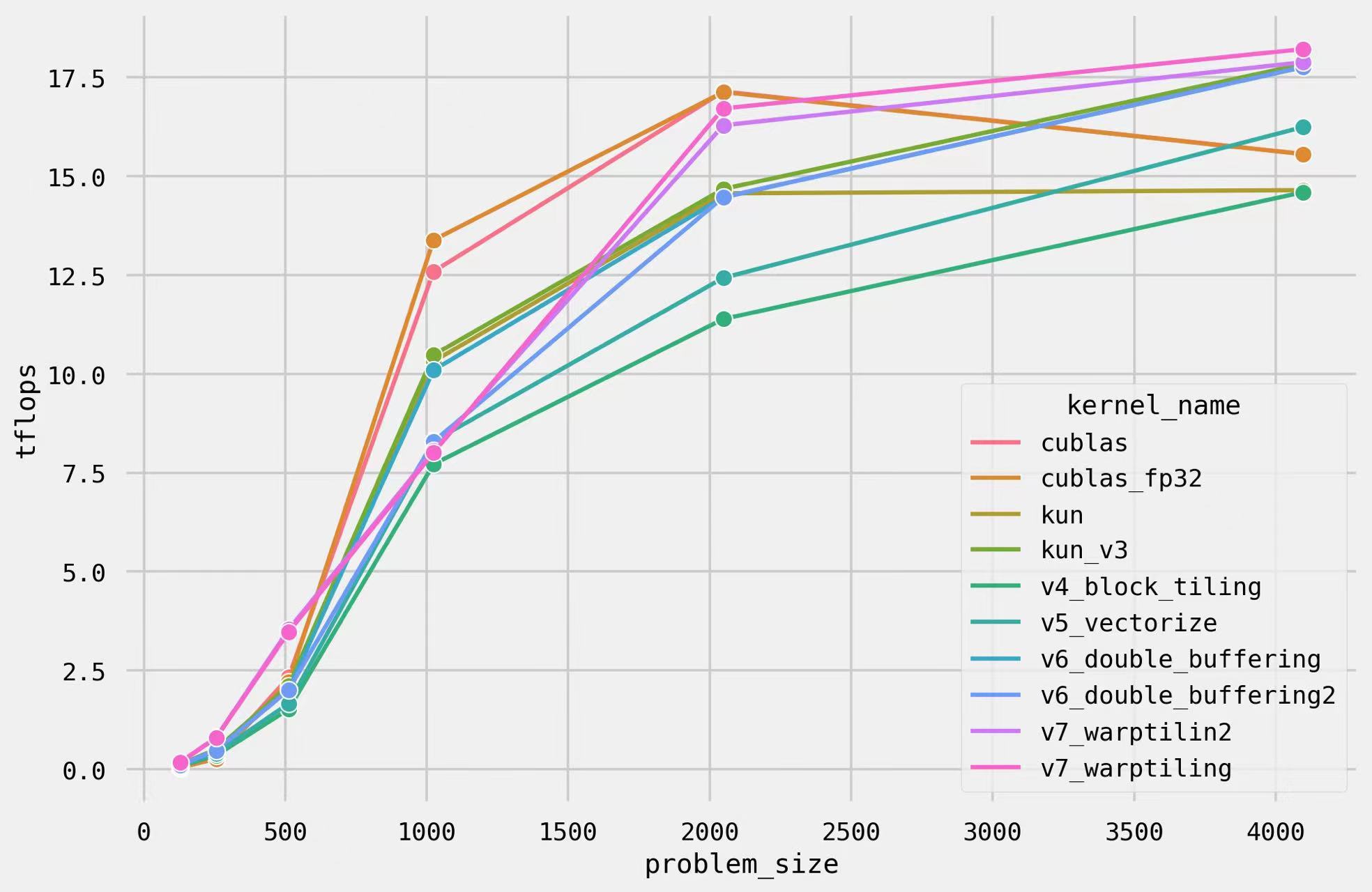
本文会从最简单的GEMM算子开始,一步一步优化,直到性能逼近cuBLAS库(Nvidia的官方库)中的cublasSgemm函数,最后我们能做到的效果如下图所示。首先介绍一下我们本次要解决的问题 SGEMM。数学上的定义如下;具体的,
\(\begin{aligned}
&\boldsymbol{C} \leftarrow \alpha \boldsymbol{A} \boldsymbol{B}+\beta \boldsymbol{C} \\
&\boldsymbol{C} \in \mathbf{R}^{M \times N}, \boldsymbol{A} \in \mathbf{R}^{M \times K}, \boldsymbol{B} \in \mathbf{R}^{K \times N} \\
&c_{i, j} = \sum_{k=1}^K a_{i, k} b_{k, j}
\end{aligned}\)
Naive Implementation
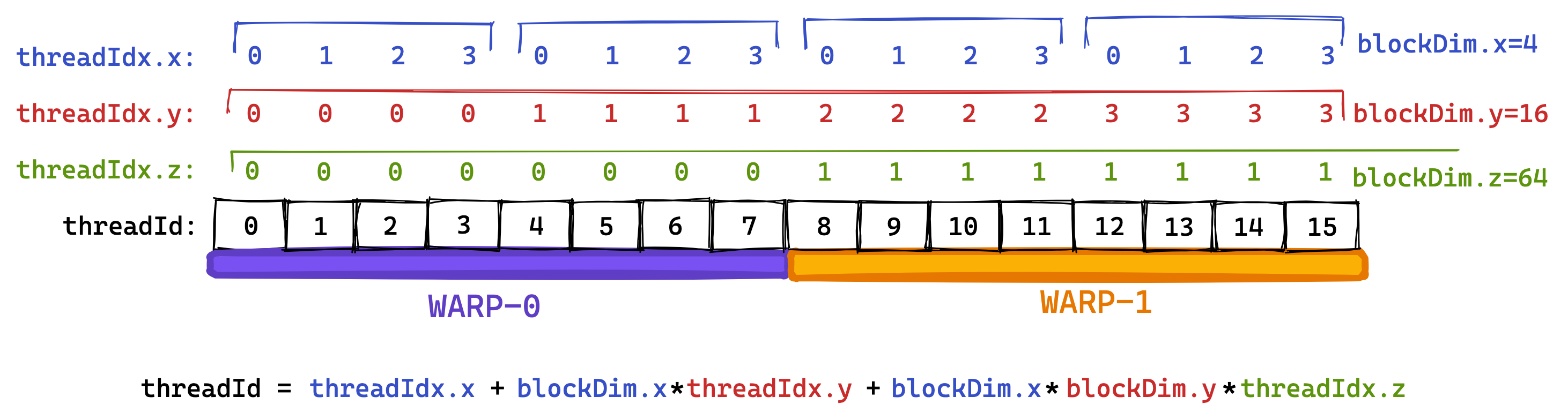
本小节从CUDA编程模型开始,介绍如何编写一个正确的GEMM kernel。在CUDA编程模型中,计算是一个三层的模型。每次调用CUDA kernel会生成一个grid,一个grid包含了多个block,每个block包含了至多1024个thread。我们编写的函数就是会运行在每个thread上。CUDA提供了一些变量来提供在这个全局的信息,例如一个block中thread的数量可以通过blockDim变量获得。这个变量包含了三个int值,代表了block每个维度上有几个thread。可以参考下图:
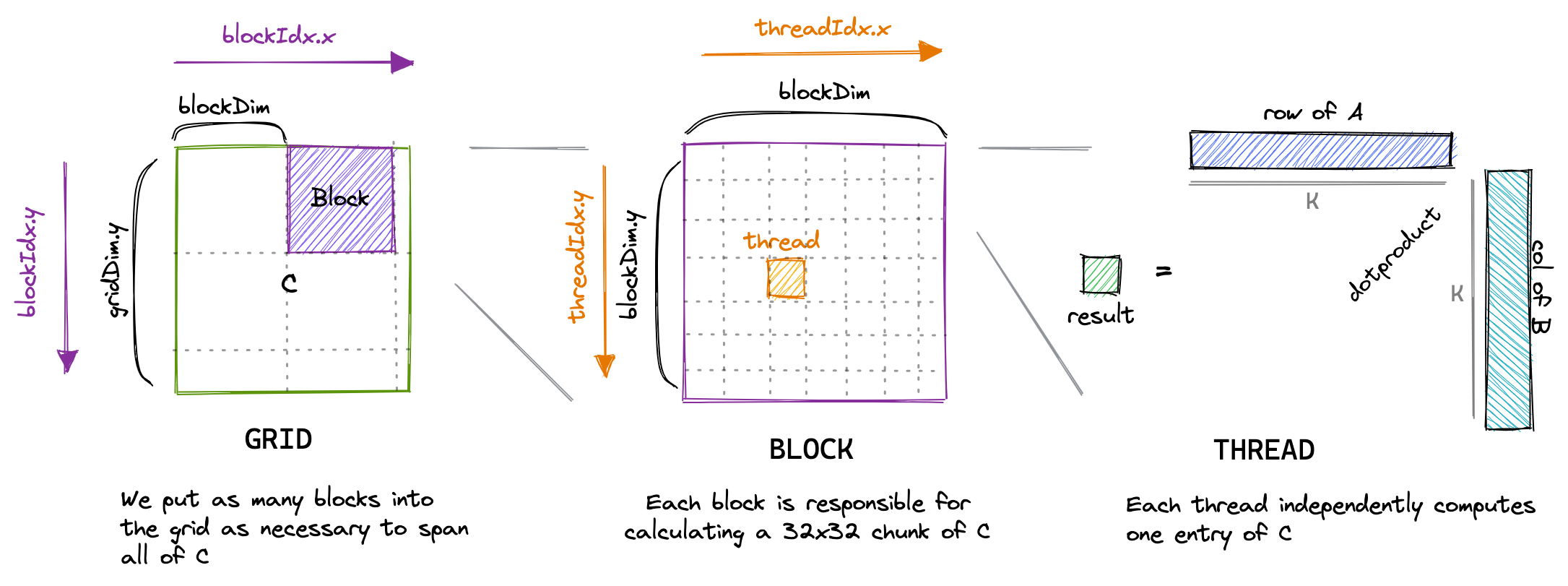
类似的,一个grid里block的个数也可以通过gridDim变量得到。在本章里,为了快速的实现一个正确的kernel,我们可以简单的认为一个block里不同的thread是等价的。在实现naive版本的时候,每个thread负责计算C中的一个元素。为了计算这个元素,我们需要load A中的一行和B中的一列。代码实现如下:
const uint x = blockIdx.x * blockDim.x + threadIdx.x;
const uint y = blockIdx.y * blockDim.y + threadIdx.y;
if (x < M && y < N) {
for (int i = 0; i < K; ++i) {
tmp += A[x * K + i] * B[i * N + y];
}
// C = α*(A@B)+β*C
C[x * N + y] = alpha * tmp + beta * C[x * N + y];
}
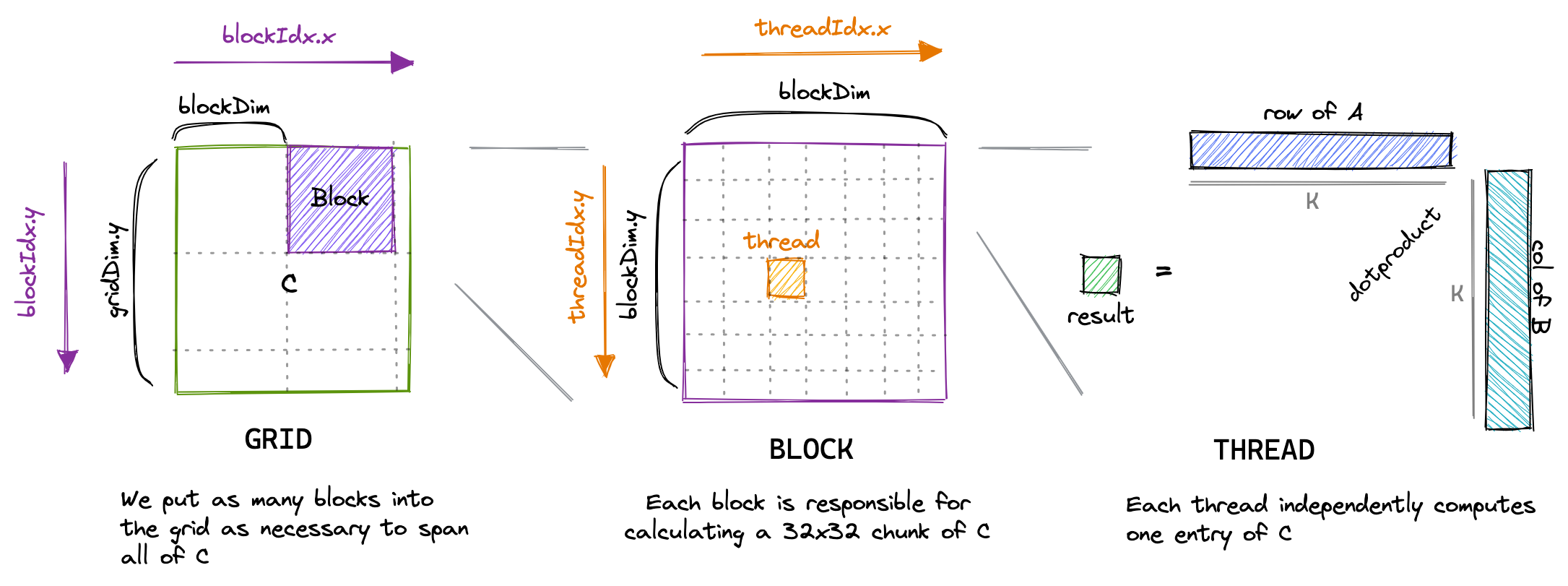
这个代码可以按照下图理解。每一个block负责计算图中紫色的部分,每个thread负责计算图中橙色的部分我们通过blockIdx和threadIdx来判断当前block的编号和thread的编号,进而唯一确定当前的threadId, 以此判断这个thread负责计算哪个部分。
下面我们分析GEMM代码的理论最优性能,以此判断我们的实现的优劣,以 M = N = K = 4096为例:
- 计算量:$2 \times 4096^3 + 4096^2 = 137 \text{GFLOP}$。 A100 FP32的理论最优值为 19.5TFLOPS。因此至少需要花7ms在计算上。
- 至少需要读 $ 3 * 4096^2 * 4B = 192MB $数据,写 $4096^2 * 4B = 64MB$数据,A100 80GB的带宽是2039GB/s,因此至少需要花 (192+64) / 1024 / 2039 = 0.1ms在访存上。注意这个值永远不可能达到,因为我们cache不够大,不可能塞下所有的数据,因此一定会有数据被重复读。
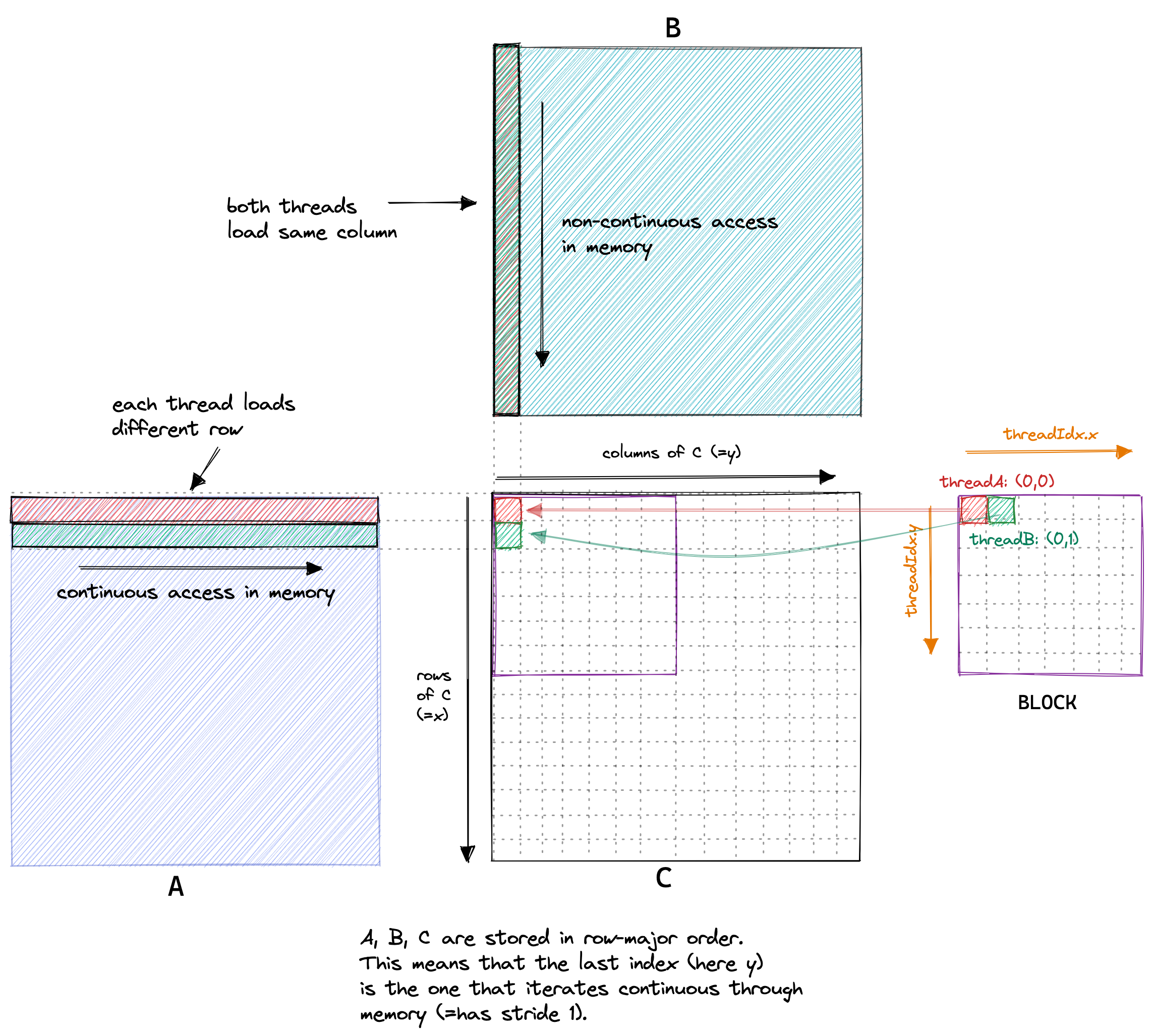
当前我们访存模式如下图所示。如果两个thread在一个block里,他们的threadIdx分别为(0, 0)和(1, 0), 它们会访问B中相同的一列,以及A中相邻的两行。每个thread需要读2*4096个float,而我们有4096*4096个thread, 一个我们需要从显存里读512GB的数据,这个数据是过高的估计,因为没有考虑上面相邻threadIdx其实只需要访问B一次。那哪怕是512GB的显存和2039GB/s的带宽,我们依然只需要250ms,但是而naive版本需要500ms,而实测cublas只需要8ms。
为了探究当前版本代码的瓶颈在哪里,我们使用如下命令进行profile。可以看到主要的问题是访存,因为内存带宽被打满了,而计算没有被打满。在compute compute里也会看到一个建议:目前一个线程为了访问4Byte的数据会导致传输528Byte的数据被传输,也就是说,我们没有达到最优解的原因是我们的访存效率只有1%。
1
ncu -o sgemm --set full --kernel-id ::sgemm_naive:6 sgemm

Memory Coalescing
既然我们需要优化内存访问,我们首先需要了解英伟达GPU的基本架构。第一个需要了解的概念是Warp:在执行的时候,同一个block里的thread会被分组,每个组就是一个warp。GPU在运行的时候,会由 warp scheduler 来决定具体执行哪些指令,warp scheduler 会以 warp 为单位执行指令。初学者可以简单的理解为,一个warp里的线程总是会被同时执行且运行相同的代码。每个multiprocessor里会有4个warp scheduler。我们会按照threadId来划分warp,相邻的threadId会被划分到一个warp里去。对于每个thread,threadId都是唯一的。threadId的计算方式是threadId = threadIdx.x+blockDim.x*(threadIdx.y+blockDim.y*threadIdx.z)。下面的图就是一个warp的一个例子。为了简化图,下图中的warpsize等于8,实际warpsize的值是32。
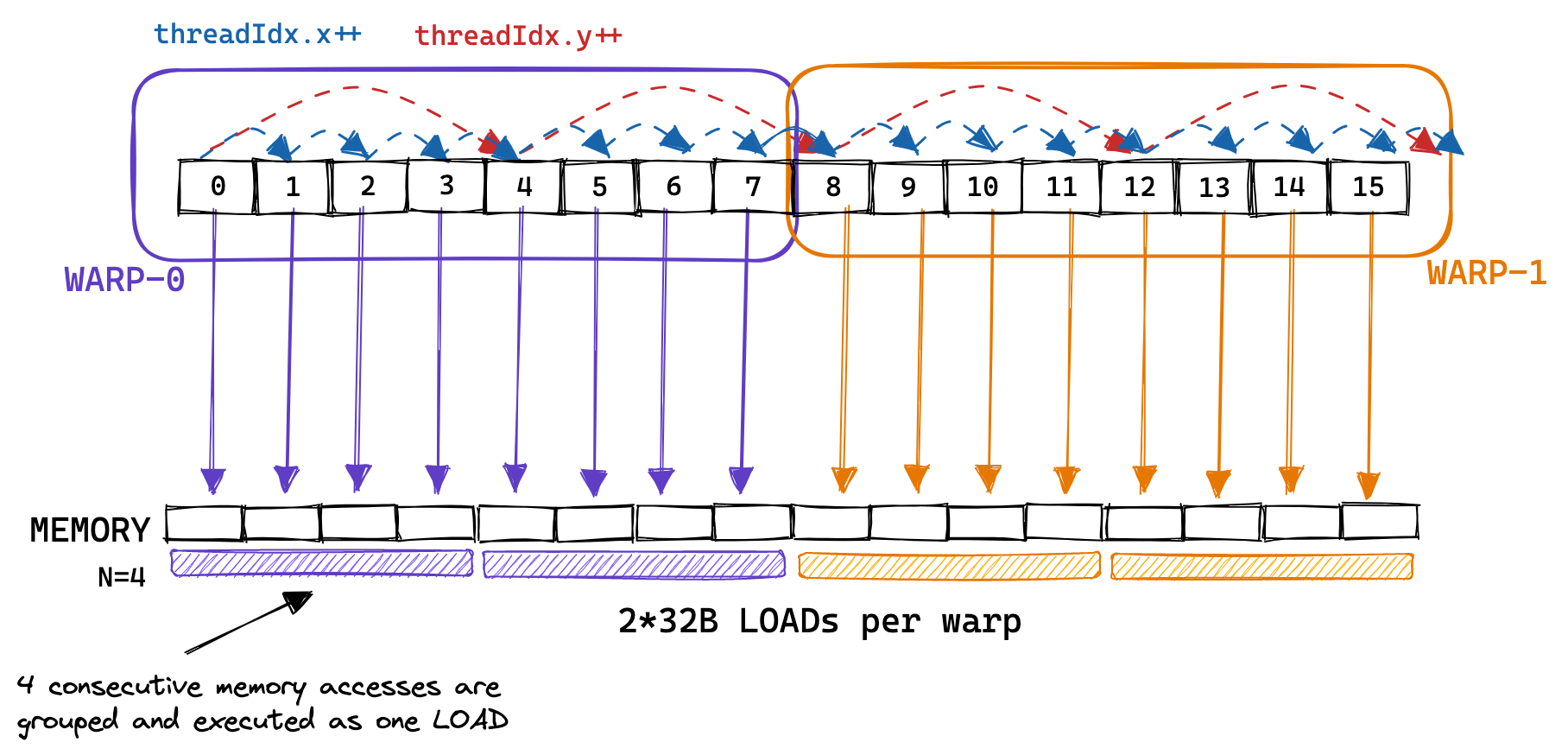
GPU支持32B,64B,128B的访存请求。如果如果每个thread要访问1个float,且一个warp的多个thread访问的显存是连续的,且内存地址是对齐(aligned)的,那么他们的访存请求会被聚合成一个32*4B=128B的请求,这就是coalescing。下图就是连续显存的访存请求被聚合成一个请求的例子。每个warp发出的8个memory access request只用了两次32B的load。(译者注:这里可能是原作者的笔误,如果warpsize=8, 每个thread访问4Byte的数据,可以被聚合成一个32B的请求而不是两个。但是不影响读者理解,图只是辅助,没必要抠细节)
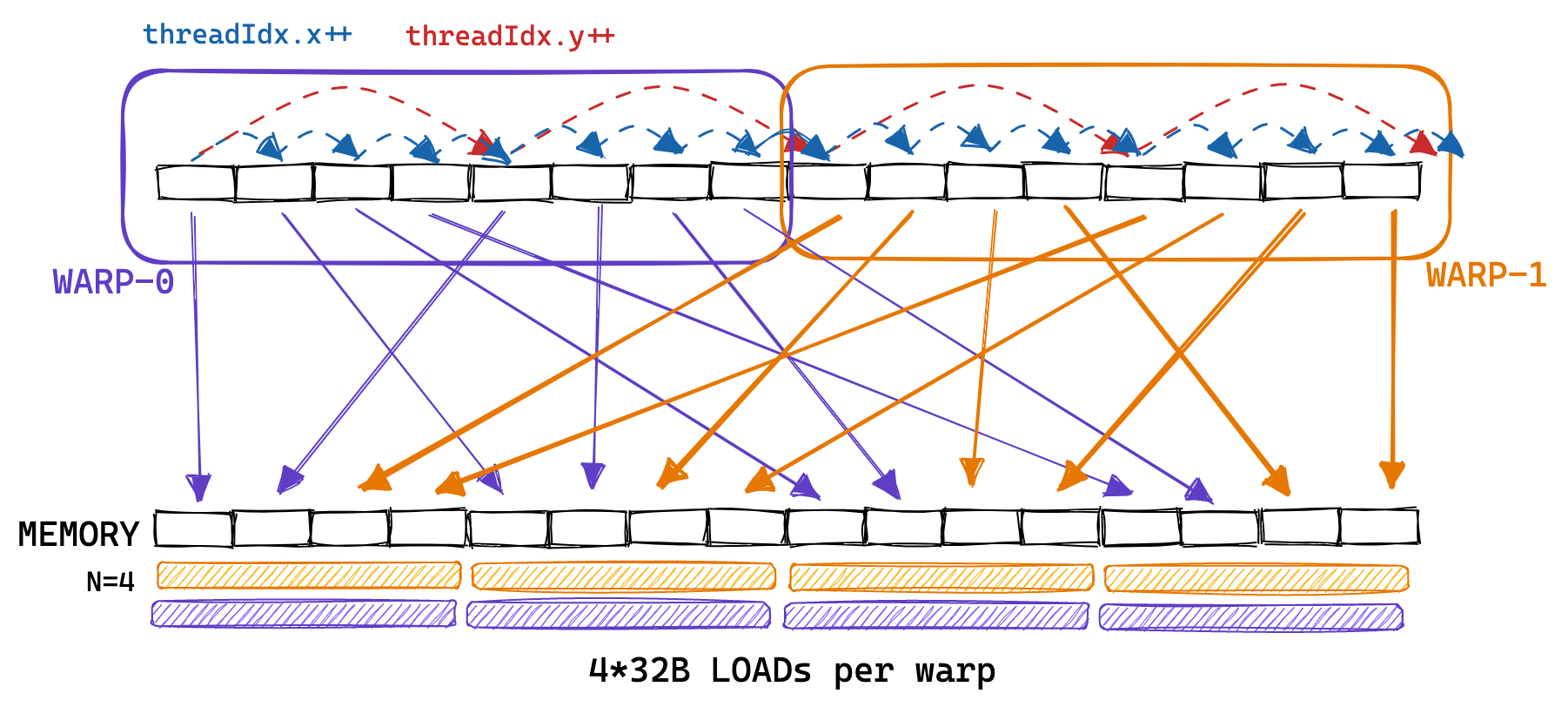
回忆naive kernel的访存模式,(0, 0), (0, 1)在一个warp里,但是去会去访问A中的不同行,不同行的数据并不是连续的。global没法一次就取回所有的数据,所以一个warp每次都需要进行很多次访存。因此naive kernel访问A的方式就像下图一样混乱。(译者注:在4096的GEMM例子里,8个thread要访问的地址应该差的很远,因此会需要8个memory access)
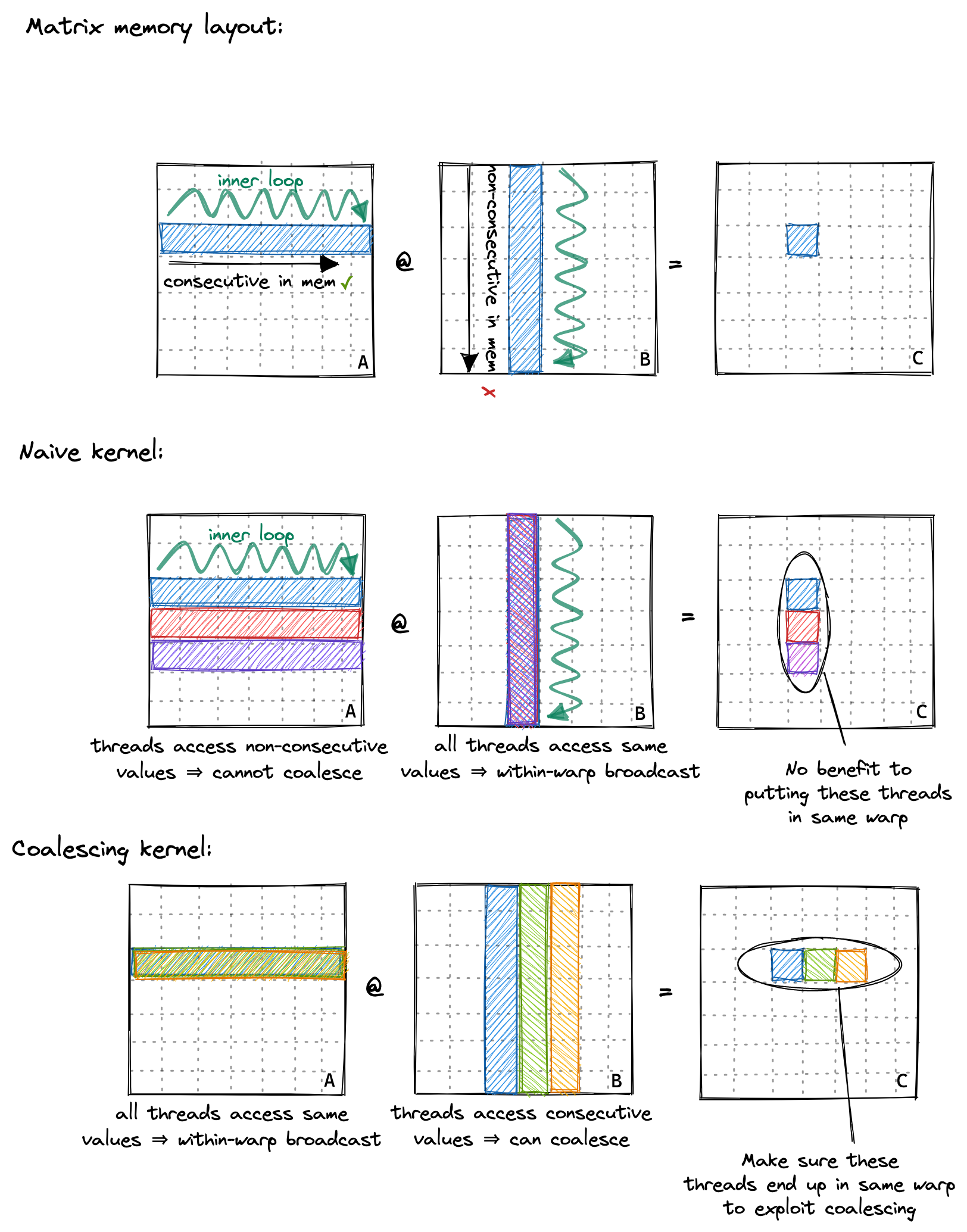
既然知道了这个,我们的思路就很清晰了,我们要让一个warp里的不同的thread访问相邻的数据。下图是我们想实现的coalescing kernel和naive kernel访存模式的对比图。在coalescing kernel里,对A的访问可以通过broadcast实现,对B的访问可以实现聚合。
这个kernel的改动非常简单,只需要修改前两行。而这个简单的优化会让整个程序的性能从500ms降低到52ms。
1
2
const int x = blockIdx.x * BLOCKSIZE + (threadIdx.x / BLOCKSIZE);
const int y = blockIdx.y * BLOCKSIZE + (threadIdx.x % BLOCKSIZE);
至此,我们走完了一个完整的优化流程:1. profiling 2. 分析当前瓶颈 3. 优化。之后我们会重复这个步骤,直到我们满意为止。
Shared Memory/BlockTiling
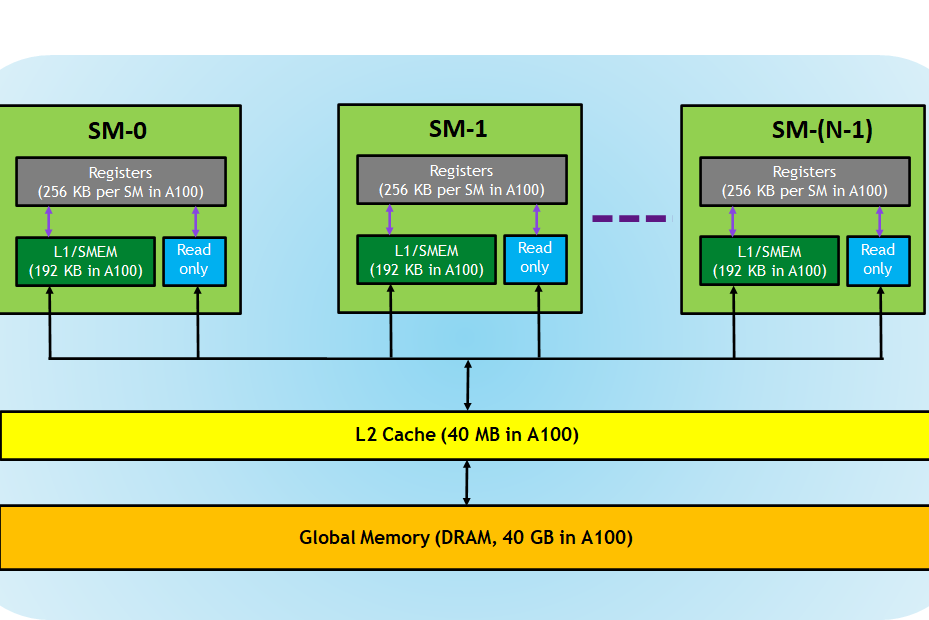
一个kernel的profile结果显示,L2 Cache的命中率只有10%。这个是我们本章要优化的现在我们就需要了解一下A100的内存架构了(下图来自这里):每个block可以访问42KB的shared memory。shared memory是在芯片上的,因此相比global memory,它有更小的时延和更高的带宽。(siboehm和我都没有找到Ampere架构的shared memory带宽,但是这篇论文的实现表明Volta上global memory的带宽是750GB/s,shared memory的带宽是12080GB/s,二者差了16倍!根据Flash Atten论文里的图,shared memory的带宽可以达到19TB/s)
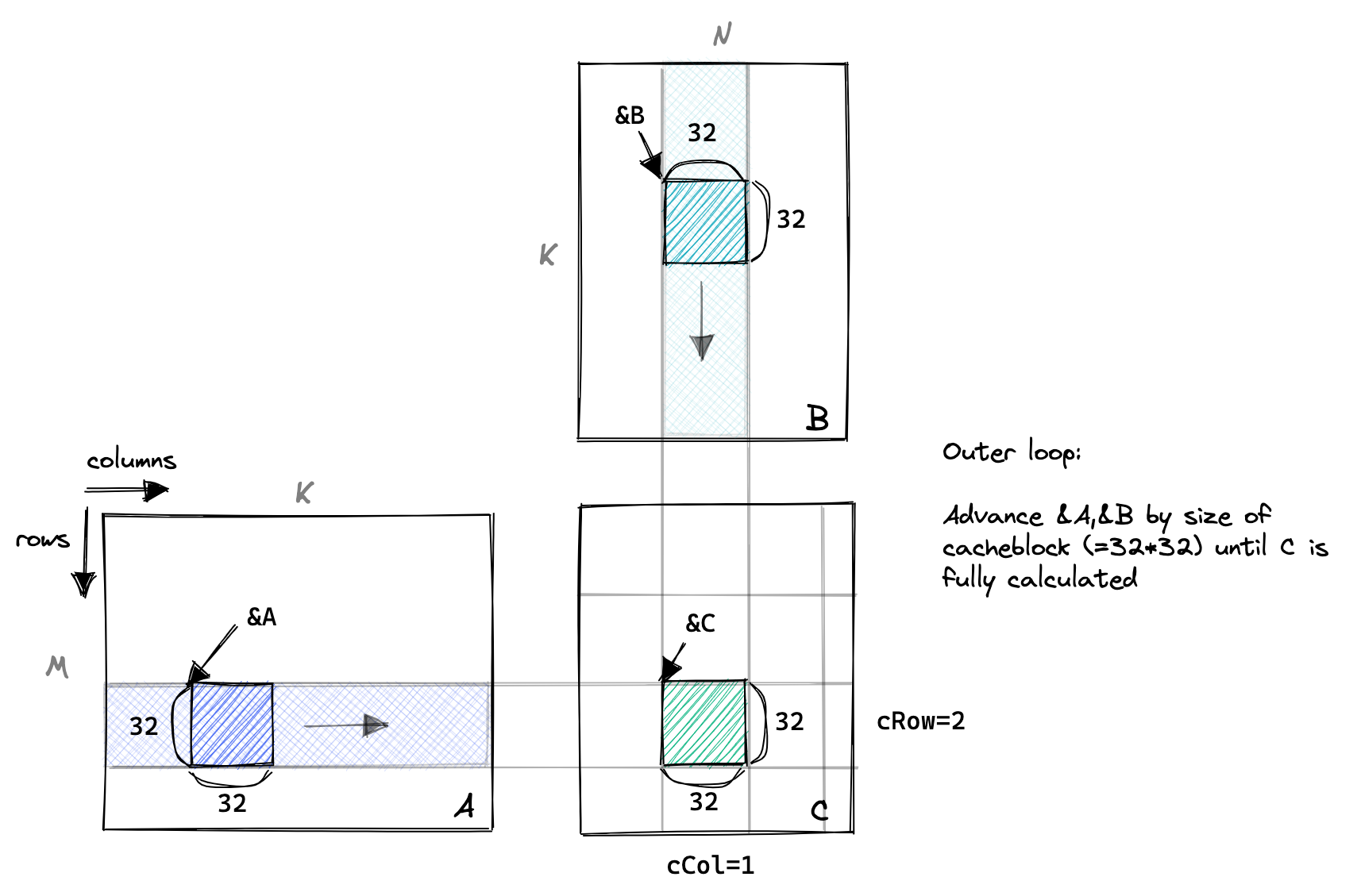
下图是整个系列中至关重要的一个抽象。一个block完成了C矩阵中的一个子矩阵的计算。为了完成这个子矩阵的计算,这个block需要从A中load好几行,从B中load好几列。既然一个block里的不同thread会用到相同的数据,那我们就先让不同的thread将数据从global memory加载到 shared memory中,然后每个thread再各自从shared memory中load数据。这样就可以有效提高shared memory的cache命中率。在下图中,每次先load 矩阵A和B的一部分,称之为blockTile,然后用这些数据计算,得到中间结果。
下面是优化后kernel的核心代码。__syncthreads()会阻塞线程直到一个block里所有的thread都执行完毕。这里我们必须保证计算和访存不可以交叠,否则计算的时候拿到的可能是错误的数据!
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
// 外层循环是对block的迭代。
for (int bkIdx = 0; bkIdx < K; bkIdx += BK) {
// load block from global memory into shared memory
for(int i = 0; i < BM; i += strideA) {
As[innerRowA + i][innerColA] = A[(innerRowA + i) * K + innerColA];
}
for(int i = 0; i < BK; i += strideB) {
Bs[innerRowB + i][innerColB] = B[(innerRowB + i) * N + innerColB];
}
__syncthreads();
A += BK;
B += BK * N;
// execute the dotProduct on the cached block
for (int dotIdx = 0; dotIdx < BK; ++dotIdx) {
tmp += As[threadX][dotIdx] * Bs[dotIdx][threadY];
}
__syncthreads();
}
优化之后,时延从52ms降到了31ms。
ThreadTiling
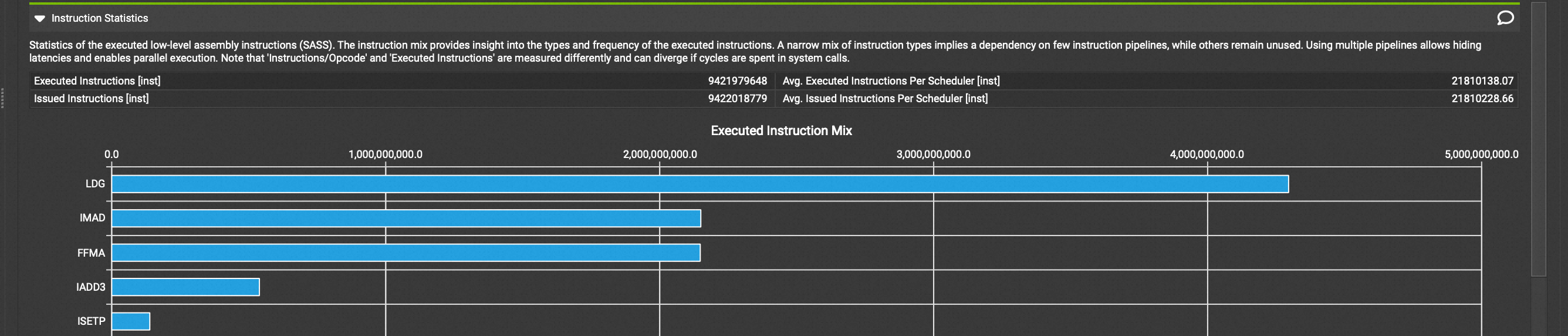
但是,cublas的时延是8.8ms。我们距离cublas还有很长的路。查看Nsight Compute的时候看到了两个warning。第一个显示Eligible Warps的数量不够多,导致机器空闲的时候warp scheduler没有warp可以去调度。第二个图显示了大部分thread被阻止的原因是 Stall MIO Throttle(详情可以参考这里Kernel Profiling Guide),意思就是,Warp因为等待Memory IO所以处于stall状态无法执行。这里提到的stall原因可能有special math instructions, dynamic branches, shared memory instructions。考虑我们的代码只有shared memory的访存,因此得到结论,我们大部分时间在等待shared memory的访存。另外查看执行执行的类型,发现大部分指令都是LD(下图三)指令,我们也可以通过Godbolt来查看编译后得到的指令,确实循环里load指令多于fma指令,同时我们知道访存比计算慢得多。综上,我们可以得出结论:当前kernel的问题是运行时大部分时间都在等待访存结果。


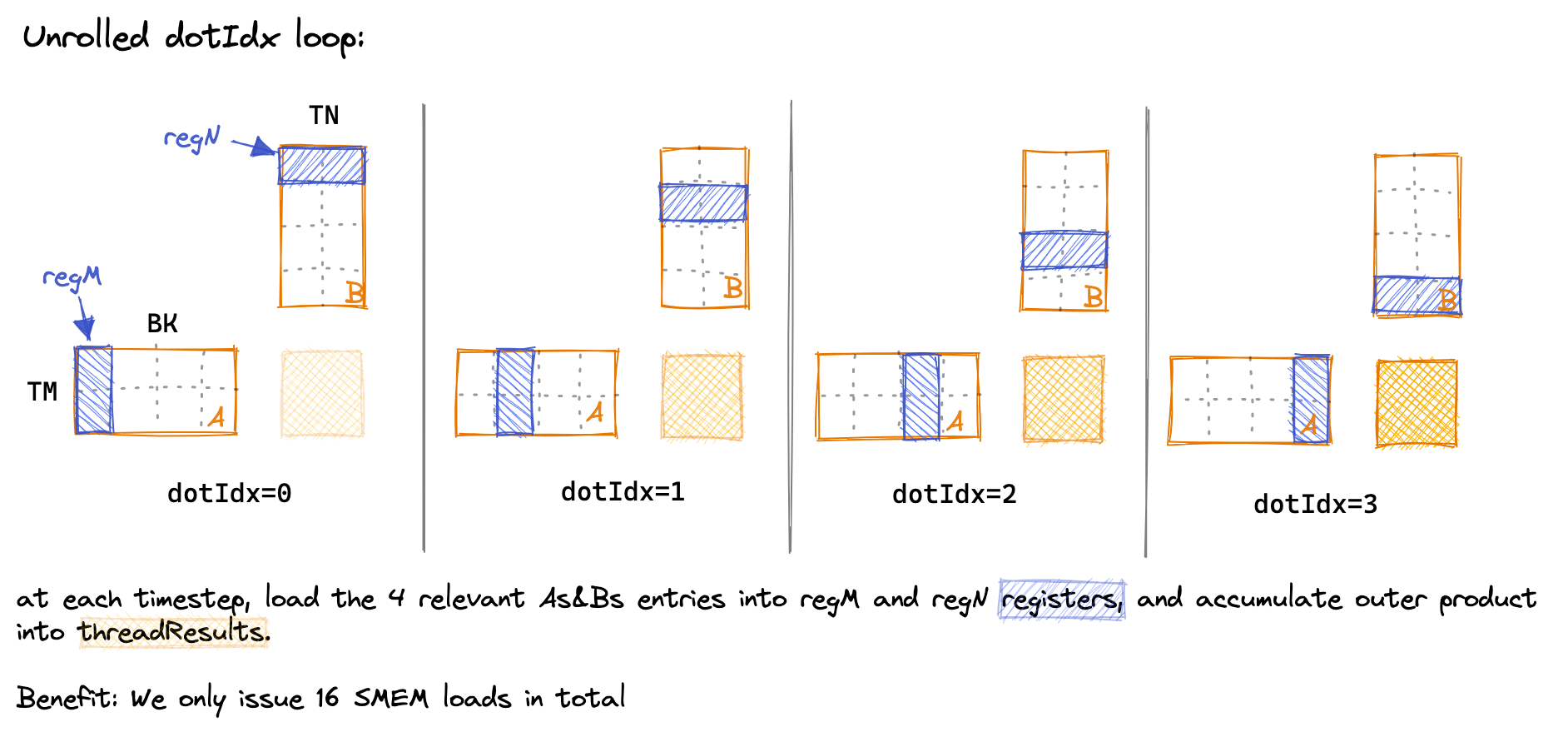
基于此,我们引入theadTiling,其目标在于让计算掩盖访存开销。每个thread负责计算TM*TN个元素,也就是一个threadTile,先将A和B的blockTile load到shared memory中,然后每次再将shared memory中的blockTile load到寄存器数组中。最后利用寄存里数组里的数据计算一个threadTile的结果。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
float threadResults[TM][TN] = {0.0};
// register caches for As and Bs
float regM[TM] = {0.0};
float regN[TN] = {0.0};
...
for (uint dotIdx = 0; dotIdx < BK; ++dotIdx) {
// load block into registers
for (uint i = 0; i < TM; ++i) {
regM[i] = As[threadRow * TM + i][dotIdx];
}
for (uint i = 0; i < TN; ++i) {
regN[i] = Bs[dotIdx][threadCol * TN + i];
}
for (uint resIdxM = 0; resIdxM < TM; ++resIdxM) {
for (uint resIdxN = 0; resIdxN < TN; ++resIdxN) {
threadResults[resIdxM][resIdxN] +=
regM[resIdxM] * regN[resIdxN];
}
}
}
原作者为了让我们理解dotIdx这个loop究竟在做什么还贴心的画了下面这张图,向我们展示了这个循环的目的就是遍历As和Bs里的所有的数据。
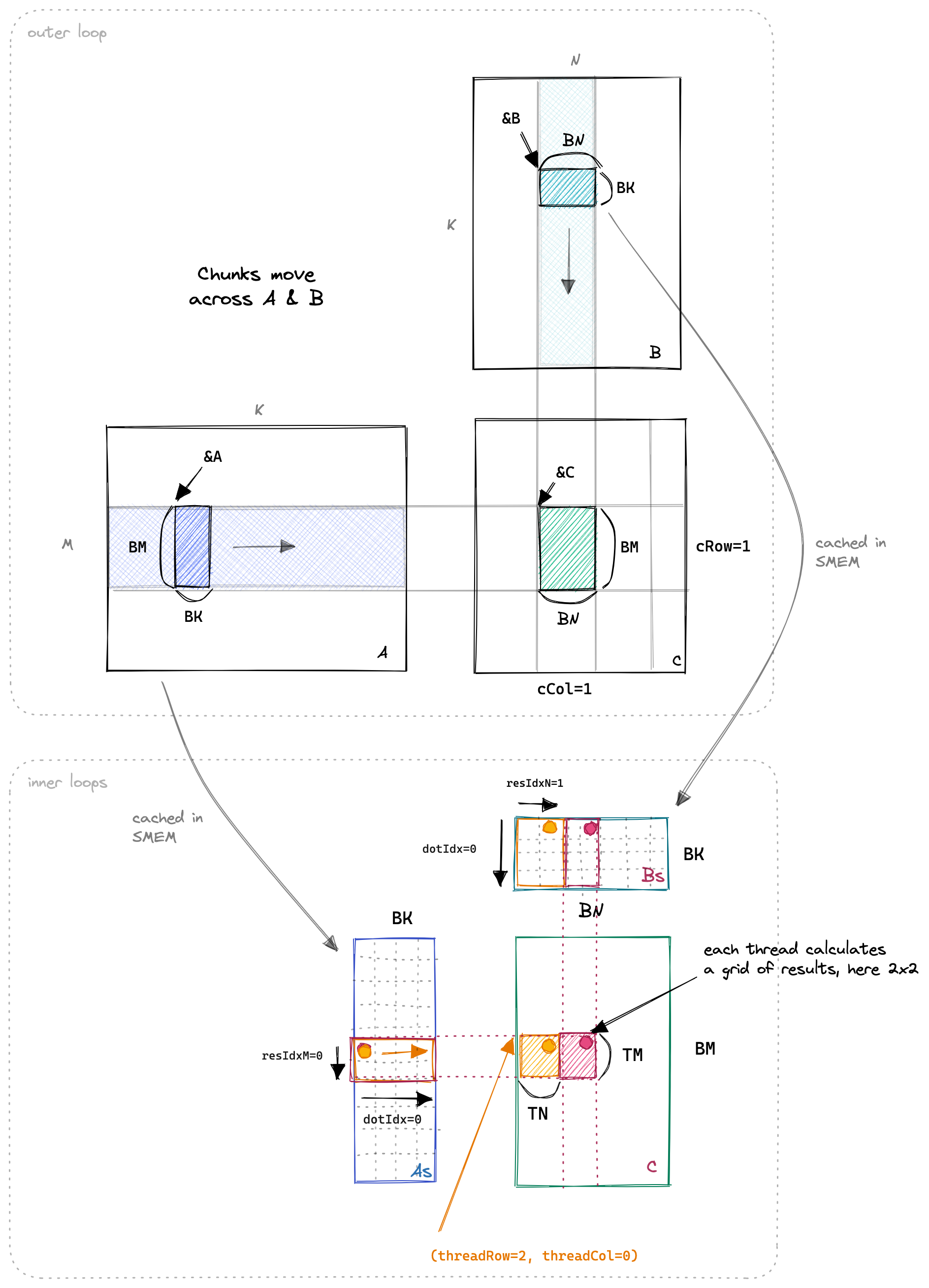
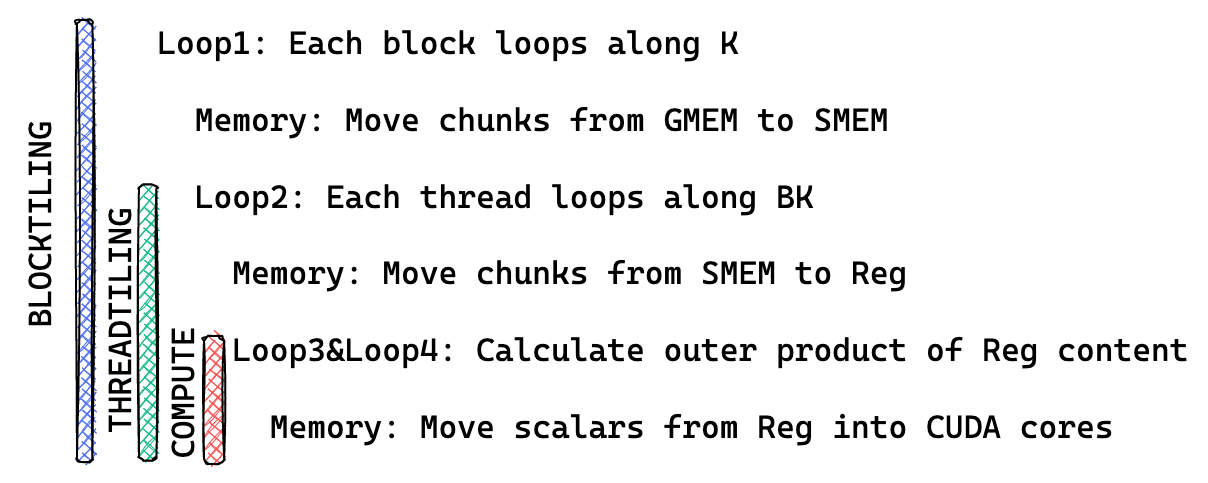
通过tiling,我们将时延从31ms提升到了11ms。至此,我们当前的程序结构如下图所示:
Transpose As & Vertorize
一个很直接想法是,是不是可以通过对As进行转置。这样每次load shared memory的时候访问的都是连续的地址空间。(作者声称可以通过这个优化实现3%的提升,原因是之前LD32指令变成了LD128指令。但是译者用Godbolt编译之后发现不转置用的就是LD128,怪事。)
![]()
之后我们考虑使用vector数据结构,也就是float4, 核心代码如下,其效果是将原来的ld.global.f32编程了ld.global.v4.f32指令,本质上也是将LD32变成了LD128。原作者一开始觉得编译器就应该自动优化global memory的访存,后来他意识到global memory的访存不一定满足aligned这个条件,所以编译器不会自动优化。而shared memory编译器是可以保证aligned的,因此会自动优化。
float4 tmp =
reinterpret_cast<float4 *>(&A[innerRowA * K + innerColA * 4])[0];
As[(innerColA * 4 + 0)][innerRowA] = tmp.x;
As[(innerColA * 4 + 1)][innerRowA] = tmp.y;
As[(innerColA * 4 + 2)][innerRowA] = tmp.z;
As[(innerColA * 4 + 3)][innerRowA] = tmp.w;
reinterpret_cast<float4 *>(&Bs[innerRowB][innerColB * 4])[0] =
reinterpret_cast<float4 *>(&B[innerRowB * N + innerColB * 4])[0];
__syncthreads();
这个指令可以做到13.3TFLOPS, 延时到了10.3ms,降低了1ms。
Double Buffering
译者参考[kunkun的代码]先实现了double buffering。因为实测原作者实现的double buffering并没有取得收益。因为在实现 double buffering 的过程中,我们会把代码拆解成不同的部分。double buffering 的本质是用计算来掩盖内存加载开销。
1
2
3
4
5
6
7
load(block)
do {
if (block->next) {
load(block->next);
}
compute(block);
} while((block = block->next)!=nullptr)
- 我们会将load blockTile into shared memory拆解成两步,第一步是load blockTile到register,第二步是load blockTile到shared memory。只有第二步需要访问 shared memory,因此只有第二步之后才需要进行__syncthreads。这么做相当于拆分的粒度更细了。
- 既然shared memory的访存可以被掩盖,register的访存开销也可以被掩盖。因此我们一步到位,直接对shared memory和register数组都使用double buffering。
伪代码如下。优化后的时延是9.4ms。拼死拼活就优化了1ms。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
// load first block tile
loadBlockTileFromGlobalMemoryIntoSharedMemory(A, B, As, Bs, ldg_A_reg, 0/*write_stage_idx*/);
__syncthreads();
// load first thread tile for current block
loadThreadTile(As, Bs, regA, regB, 0/*dotIdx*/, 0/*load_stage_idx*/);
int write_stage_idx = 1, tile_idx = 0;
do {
tile_idx += BK;
if (tile_idx < K) {
// load next block tile - first step
loadBlockTileFromGlobalMemoryIntoRegister(A, B, ldg_A_reg, ldg_B_reg, tile_idx);
}
int load_stage_idx = write_stage_idx ^ 1;
#pragma unroll
for (uint dotIdx = 0; dotIdx < BK-1; ++dotIdx) {
// load next thread tile from current block
loadThreadTile(As, Bs, regA, regB, dotIdx+1, load_stage_idx);
// compute current thread tile
computeThreadTile(regA, regB, threadResults, dotIdx);
}
if(tile_idx < K){
// load next block tile - second step
loadBlockTileFromRegisterIntoSharedMemory(ldg_A_reg, ldg_B_reg, As, Bs, write_stage_idx);
__syncthreads();
write_stage_idx ^= 1;
}
// load first thread tile
loadThreadTile(As, Bs, regA, regB, 0/*dotIdx*/, load_stage_idx^1);
// compute the last thread tile of the current block
computeThreadTile(regA, regB, threadResults, 1/*dotIdx*/);
} while (tile_idx < K);
Warp Tiling
最后一个优化,是在blockTile和threadTile之间引入warp。更细粒度的决定每个warp的行为。每个thread负责计算一个TM*TN的小矩阵,每个warp则负责计算WM*WN的矩阵。因为warp是调度的基本单位,warp tiling方便我们之后来看bank conflicts(本文不会涉及); 同时warpTiling可以更好地提升局部性,提升cache命中率。
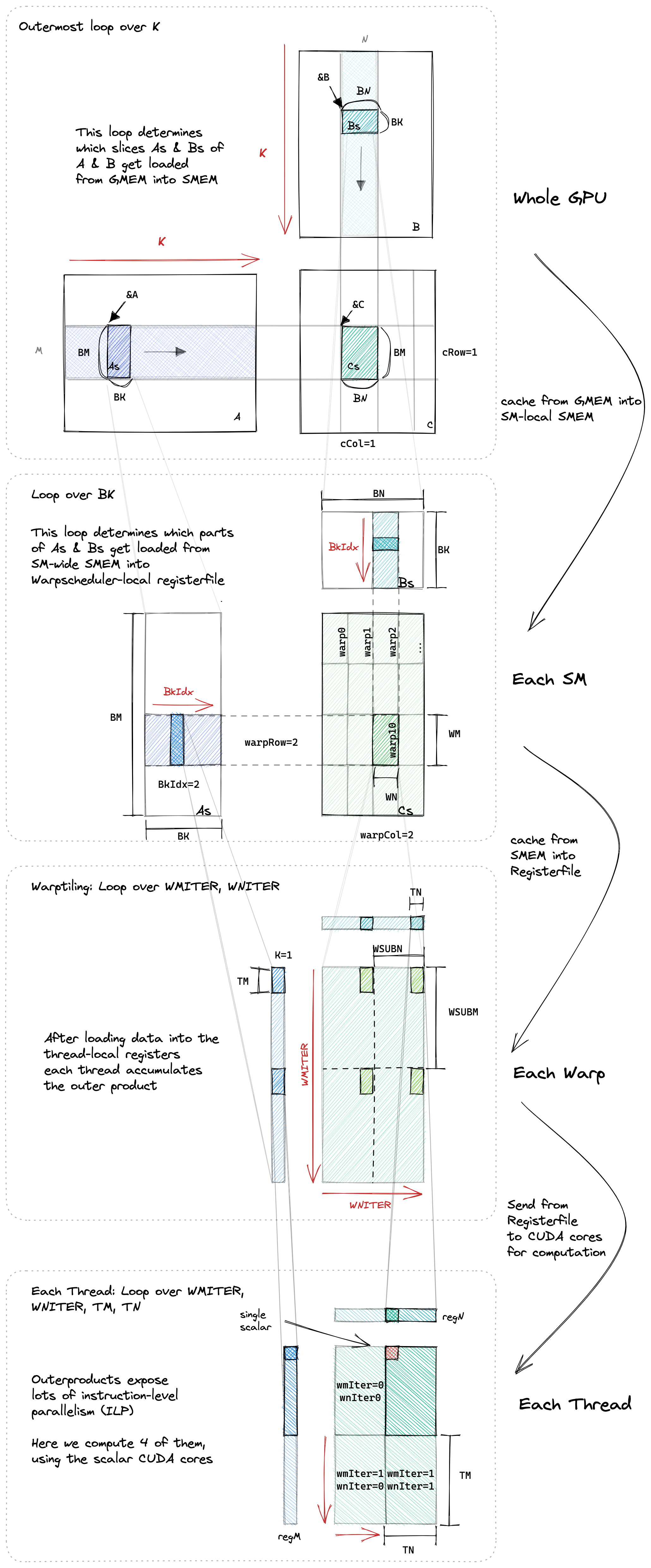
在我们之前的代码中,只有computeThreadTile 和 loadThreadTile 的逻辑需要改变。原来一个thread只负责一个threadTile,现在负责多个threadTile, 因此需要引入额外的循环来处理warp层面的tile。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
for (uint wSubRowIdx = 0; wSubRowIdx < WMITER; ++wSubRowIdx) {
for (uint i = 0; i < TM; ++i) {
regM[wSubRowIdx * TM + i] =
As[(dotIdx * BM) + warpRow * WM + wSubRowIdx * WSUBM +
threadRowInWarp * TM + i];
}
}
for (uint wSubColIdx = 0; wSubColIdx < WNITER; ++wSubColIdx) {
for (uint i = 0; i < TN; ++i) {
regN[wSubColIdx * TN + i] =
Bs[(dotIdx * BN) + warpCol * WN + wSubColIdx * WSUBN +
threadColInWarp * TN + i];
}
}
void computeTile(
const float* regA, const float* regB, float* threadResults, const int dotIdx) {
#pragma unroll
for (uint wSubRowIdx = 0; wSubRowIdx < WMITER; ++wSubRowIdx) {
#pragma unroll
for (uint wSubColIdx = 0; wSubColIdx < WNITER; ++wSubColIdx) {
// calculate per-tile results
for (uint resIdxM = 0; resIdxM < TM; ++resIdxM) {
for (uint resIdxN = 0; resIdxN < TN; ++resIdxN) {
Val4D(threadResults, wSubRowIdx, resIdxM, wSubColIdx, resIdxN, TM, WNITER, TN) +=
Val3D(regA, dotIdx%2, wSubRowIdx, resIdxM, WMITER, TM) *
Val3D(regB, dotIdx%2, wSubColIdx, resIdxN, WNITER, TN);
}
}
}
}
}
warptiling 最终能达到14.9TFLOPS,达到了cublas的96%的性能,延时到了9.19ms。
结束语
到此为止了。从profiling的角度看,目前L1 cache 的命中率很低,可以考虑优化一下;从看博客的角度看,bank conflicting我也还没优化;恐怕再往后再去优化就要写汇编代码了,我也就不深入去搞这个了,毕竟各位读者不会给我打钱。另外,现在还没有使用tensor core,之后会再找一个机会学习tensor core。在我快写完这个博客的时候,美国出了新的禁令,禁止了中国公司购买A100,说不定新的芯片里tensor core已经没有了。这大概也是上天给的信号,这次项目就到此为止吧。
第一次接触GEMM是之前在UCLA上一门课的时候,这个是那门课的project,那个时候还没毕业,可以静下心来好好学习CUDA,写了很多不规范的乱七八糟的代码,没有认真调研,优秀的博客也是一目十行的度过,也没认认真真写完这个博客;现在上班了,被各种事情弄得焦头烂额,却努力挤出时间写完了这个。写这个博客的时候,有一瞬间仿佛回到了加州,那个时候还有大把大把的时间可以挥霍,所以文中经常提到我马上就要去学flash attention,大概就是我处于学生时间的不切实际的幻想。但是我也真心希望之后真的能抽出时间学习自己想学的东西,永远都能做自己想做的事情。
